
Finetuning DinoV3
A tutorial on how to finetune DinoV3 with your own dataset.
Introduction
DinoV3 is the newest a foundation model for visual tasks released by Meta. It's a very powerful model that can be used as a backbone (or a feature extractor) for many downstream vision tasks, such as classification, segmentation, and depth estimation. By extracting visual features, it removes the burden when training our own models to learn them, streamlining the development of task-specific neural networks with state-of-the-art performance.
DinoV3 is originally trained with the LVD-1689M dataset, a Meta-owned dataset containing over 1B "public Instagram images," capable of generating high-quality features for real world images. While the base model performance may be great for real-world scenarios where it was trained, applying these features to other domains where the image patterns, colors, and textures are different from the training data can result in not-so-informative features. In this context, fine-tuning can significantly improve the performance.
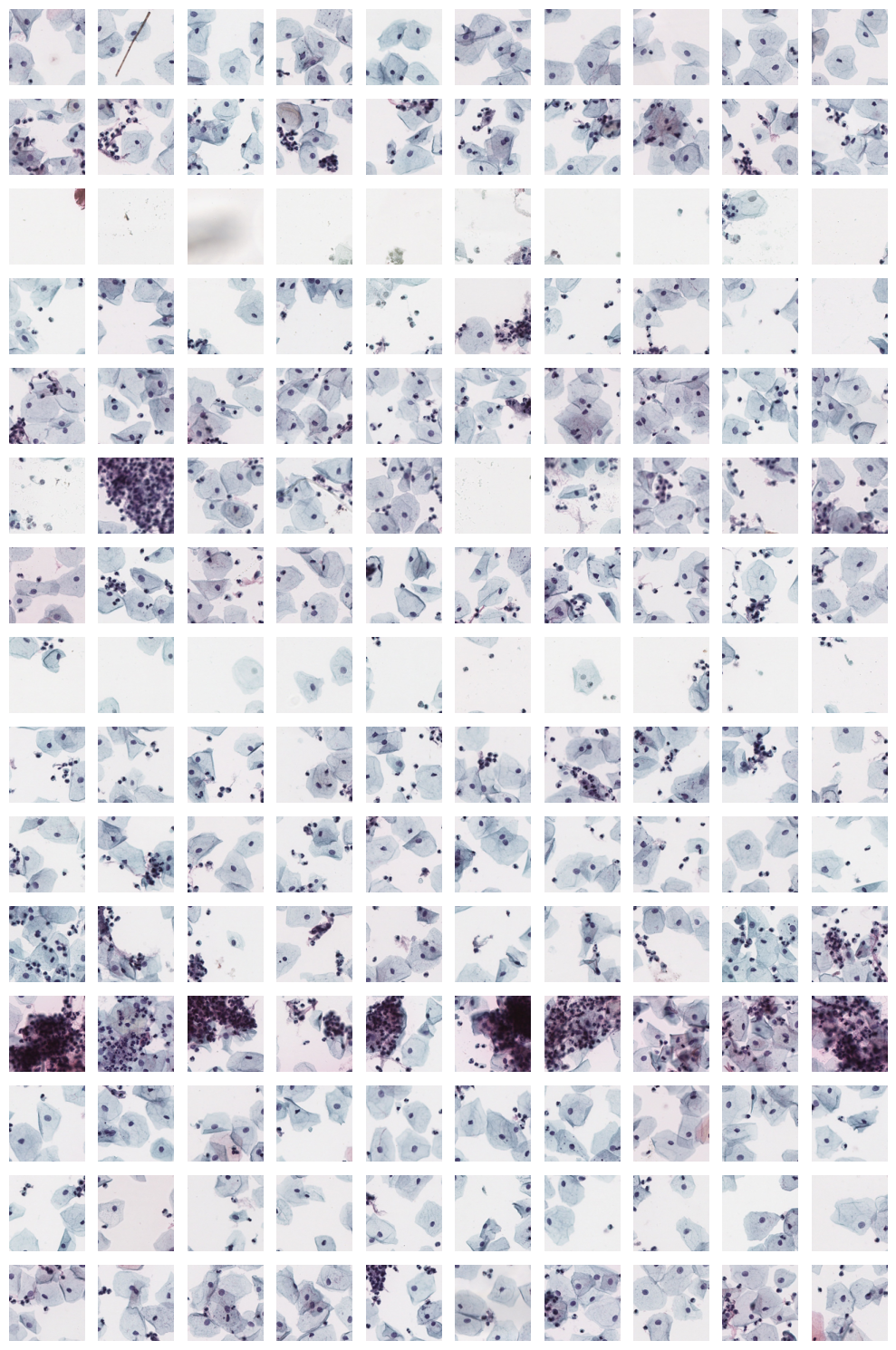
An example is my application domain: cytologic images classification, illustrated in the image below. It is quite different from the real-world image domain the DinoV3 is originally trained, and the images contain particular morphologies, staining patterns, and arrangements that we would like to be reflected in the features generated by the model.
In this post, I'll describe how to fine-tune the DinoV3 model using a custom dataset, along with the challenges I encountered during the process. This may be helpful for those who need to fine-tune the model with their own data, as the official repository lacks detailed implementation guidance for custom datasets and training from scratch.
Getting started
We start by cloning the project from the official GitHub repository.
Then, instantiate your environment using your favorite management tool. For instance, with mamba:
The project might be overwhelming at first, but there are only a few directories we must get acquainted to inside the
DinoV3 folder:
configs\train\: contains exampleyamlconfiguration files, we will use this to create our configuration file.data\datasets\: this is where we are going to define our dataset and load the images.
Defining your dataset
Inside the data\datasets folder is where datasets are defined. Create a new file for the name of your dataset, for
instance, my_dataset.py. Inside it, define the basic dataset class structure, which should extend from the
ExtendedVisionDataset class.
A basic dataset must implement the __getitem__ and __len__ functions, in a traditional PyTorch fashion. The
__getitem__ function must return a tuple containing the PIL.Image and a label associated with the image. If you
don't have any label information (as it was in my case), you may return None.
To illustrate, in my project I am loading cytologic tiles directly from Whole Slide Images (WSI, which are large image files used by digital pathology workflows, often reaching 100.000 px by 100.000 px of resolution).
My implementation uses the __init__ function to create a list containing all tiles (small 224 px patches from the
original image) and their information, such as its slide and coordinates. Then, during __getitem__, I use openslide
to open the slide file and the read_region function to load the image/tile in a PIL.Image format.
Notice that we are only loading the images when they are needed, before that, we only have the instructions on how to load them.
Once your custom dataset is completed, you need to register it in the data/datasets/__init__.py file to load it
directly when importing data/datasets.
Now we must inform the loader how to instantiate your new dataset class. Proceed to the data/loaders.py file, which
is responsible for instantiating the datasets from the argument of the yaml configuration file. Search for
the _parse_dataset_str function (lines 46 -- 74) and modify it so the class_ variable points to your newly created
class based on the value of the name variable.
For example, to instantiate the MyDataset class when the dataset is MyDataset on the configuration file, modify the
function as such:
Your custom dataset is now completed.
Defining your model
To train DinoV3 on your dataset, we must create a yaml configuration file defining your model and dataset, then start
the training process. Training DinoV3 is divided in several steps, but for our use-case only the first two are really of
interest: pretraining and gram anchoring.
Pretraining
Proceed to the config folder, we are going to set up the model. There are several files there already that will serve
as examples of how to configure different parts of the training. We will start by the pretraining phrase, so make a copy
of the dinov3_vit7b16_pretrain.yaml file.
Defining your dataset
Let's modify the original pretraining configuration for our needs. For starters, we will set the dataset to our newly
implemented dataset class. Proceed to the train key and modify the dataset_path to use the name
you set up on the loaders.py:
While you are there, there are several fields of interest that you might want to customize, such as the batch size, the save frequency, or the number of workers.
Defining your model
The key benefit of DinoV3 is that the proposed training enhancements allowed for scaling the model to 7 billion parameters, achieving a size comparable to popular large language models. The default training configuration proudly shows that. However, it's quite inviable for many people to train such a large model.
Luckily, similar to DinoV2, you can change the architecture of the network to a smaller one. Proceed to the student
key, which defines the architecture of both the student and teacher networks. In my case, I used the vit_base
model by changing the arch value:
Other possible values include:
| Parameters | Embedding Size | |
|---|---|---|
| vit_small (ViT-S) | 21M | 384 |
| vit_base (ViT-B) | 86M | 768 |
| vit_large (ViT-L) | 300M | 1024 |
| vit_giant2 (ViT-g) | 1.1B | 1536 |
| vit_7b (ViT-7B) | 7B | 4096 |
Continuing from LVD-1689M
The last modification of interest is to use the publicly available weights to continue the training rather than starting from random weights. Go to the Meta DinoV3 downloads website to request access and download the version compatible with the architecture you just selected.
Once you have access, download the model set its location within the MODEL key of the configuration file (the first key):
Finally, the last field of interest is in optim. You may want to customize the epoch and perhaps the learning rate.
Launch the training
Now everything should be good to go! There are several ways to start training depending on your configuration. The
recommended way is to use Meta's submitit library to control SLURM in your multi-node GPU cluster. If this is your
case, you can follow the instructions of the official GitHub page and start training with the following command:
However, if you don't have multiple nodes, or don't have a SLURM setup, you can start training on a single machine
containing N GPUs by the traditional way: using torchrun. For this purpose I made the following run.sh file for
launching the training.
The setup works as follows:
CUDA_VISIBLE_DEVICES: limits which GPUs the process is allowed to use. In this context, I have 4xNVIDIA A100 40GB, and I am allowing the model to use 3 of them, excluding the first one.PYTHONPATH: includes the current folder in the Python module search path;
Training starts with the torchrun command. The --nproc_per_node=3 dictates that I want the training to occur with 3
GPUs (specified with the CUDA_VISIBLE_DEVICES). Then, we have the python script with the training code, the
configuration file you just made (--config-file) and the results dir (--output-dir) where the model is going to be
saved.
Some additional information: once training starts, it saves a checkpoint each checkpointing.period. If training is
restarted, it will continue from the last checkpoint. Furthermore, the code also keeps track of the existing checkpoints
and only keeps the last checkpointing.max_to_keep checkpoints. Finally, each checkpointing.keep_every iteration, a
new permanent checkpoint is saved, so if anything happens you can go back to it.
You are ready to start training! Run:
Unexpectedly, the process is Killed
You start training, and after a few minutes watching the logs, you get the message that the process is killed. Indeed,
running the process again and checking with htop, you verify that the RAM usage keeps increasing on each new
iteration.
If this happens to you as well, the solution is actually simple: proceed to the train/train.py script which dictates
how the model is trained. There,
on line 434, you see
the comment "Manual garbage collection," followed by the
gc.disable() that turns off the GC. It seems the authors' idea was to manually trigger the garbage collection, both in
line 436 and, during
the training loop, on
line 466.
Unfortunately, on my setup (a single DGX A100 machine, with 4xA100 40gb), that didn't work. The GC gets disabled, but the manual collection doesn't happen. While the collection command does freeze the process for a couple of seconds, the memory consumed by the previous iteration doesn't get released, and the whole process is killed after a few iterations.
Removing the command to disable and to perform the collection solves the issue. My intuition is that this approach
doesn't work when using torchrun, or perhaps it's related to a single node training. Regardless, the removal of the
instructions solves the Killed issue and allows the training procedure to continue as intended.
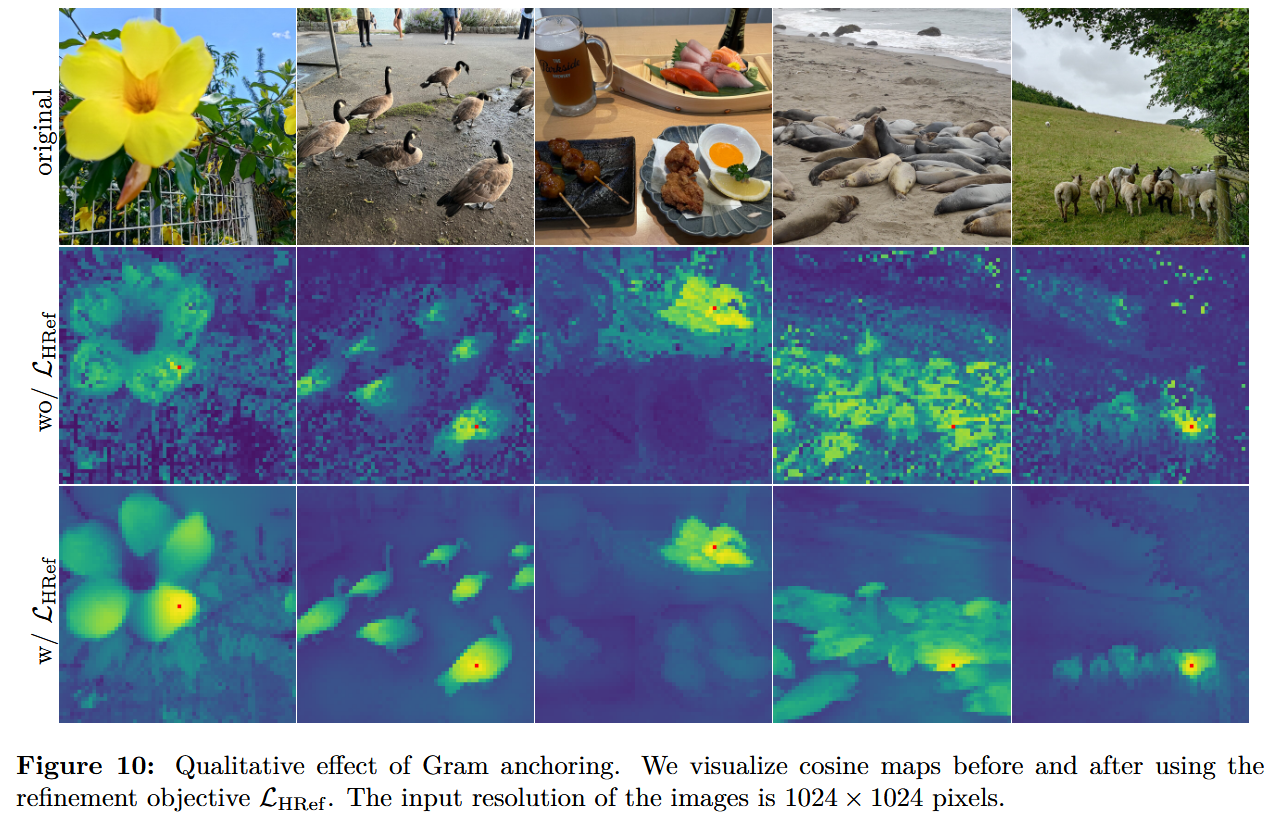
Gram anchoring
Now that the pretraining phrase is done, you might want to continue training with gram anchoring as well. Gram anchoring is one of the solutions that allow DinoV3 to scale the train procedure and enable the development of larger models. It uses an early checkpoint that has a supposedly stable dense feature to prevent the degradation of the dense feature introduced by longer training schedules. You can read about it in the paper.
To start the gram anchoring training, you must enable it in your configuration file. Check the
configs/train/dinov3_vit7b16_gram_anchor.yaml for an example of how to set the key gram on your file to true.
Replacing the entire object is a start.
Importantly, training requires the ckpt value to be set. This is the path to that "previous" checkpoint that will
be used to produce stable dense features and guide the rest of the training. When I was first implementing this, it
wasn't clear what this value was supposed to be, since pointing to a checkpoint inside the results folder wasn't
working: it complained that the model keys were incompatible with what they expected.
The expected value is a checkpoint inside the eval folder (for example /MyDatabaseResult/eval/). Instead of using a
full checkpoint containing both the teacher and student networks generated during training, you must point to a
checkpoint containing only the teacher network that is generated periodically inside the eval folder on your output
directory. Point the ckpt value to any checkpoint inside the eval folder and start the training again to continue
the process with gram anchoring.
Training, tracking, and inferencing
During training, the logs, metrics, checkpoints, and configuration file is saved in the defined output folder. The folder has the following structure:
eval: contains periodically saved teacher models;ckpt: contains the training checkpoints, including the teacher and student networks to resume training;logs: contains the text logs per GPU;config.yaml: contains the configuration file defining the model trained in this folder;training_metrics.json: contains the metrics in a JSONL format.
Let's explore what options those files enable during training and after training the model.
Tracking progress
DinoV3 logs the training metrics in a jsonl file inside the output folder, named training_metrics.json. This makes
it quite easy to check the results using a jupyter notebook. For example, the following code should plot the
total_loss:
Inferencing and testing
During training, instantiating and playing with the model can also be done, both with the training checkpoints which are updated more frequently and the eval checkpoints. Let's explore how to instantiate and run inference with the model you are training.
Instantiating the model
The first step is to instantiate the model with your configuration file. For this purpose, the config.yaml file in
your
output directory is used, as it contains the parameters that describe how the model should be created, such as the
number of parameters, allowing the saved weights to match.
The model can be instantiated from your config.yaml file using the build_model_from_cfg file from dinov3.models.
Use the OmegaConfig library to load your yaml file:
The function returns a tuple containing the student network, the teacher network (generally used for inference) and the embedding dimension generated from the networks.
Loading the weights
Now we have a randomly initiated ViT, but it's still missing the weights we trained with our dataset. DinoV3, in
contrast with DinoV2, uses the recommended
Distributed Checkpoint (DCP)
system to save the checkpoints while in multi-GPU environments, which uses file formats that can't be loaded with
torch.load.
Luckily, DPC has a function to convert the checkpoint back to a serialized "torch" file:
Now, the weights can be loaded as normally with the torch.load function:
In the example below, we prepare and load the weights from the teacher network from a training checkpoint. Notice that the checkpoint contains both networks, so we create a new object and only add the weights of the teacher. Furthermore, we skip keys related to the gram network, and we also remove the "backbone." key for the keys to match the expected name:
To instantiate the model on the first GPU with the correct weights, use the following code:
You may want to serialize the model using ONNX for using it in the future.
Conclusion
I trained the model for a couple of days on 3xA100 GPUs and used the model to extract features for Multiple Instance Learning tasks in the cytology domain. While I am not ready to show the results we got, I can say that I am impressed by the performance and can atest to the benefits of fine-tuning DinoV3 when you need to use the model in a different domain from what it was trained.
To illustrate the results we got, I used the model for extracting features of the tiles from a given cytology slide. I then used PCA to turn the 738 features into three main components, which are used to color the different tiles. This allows us to have an idea of different or similar each tiles are from themselves.
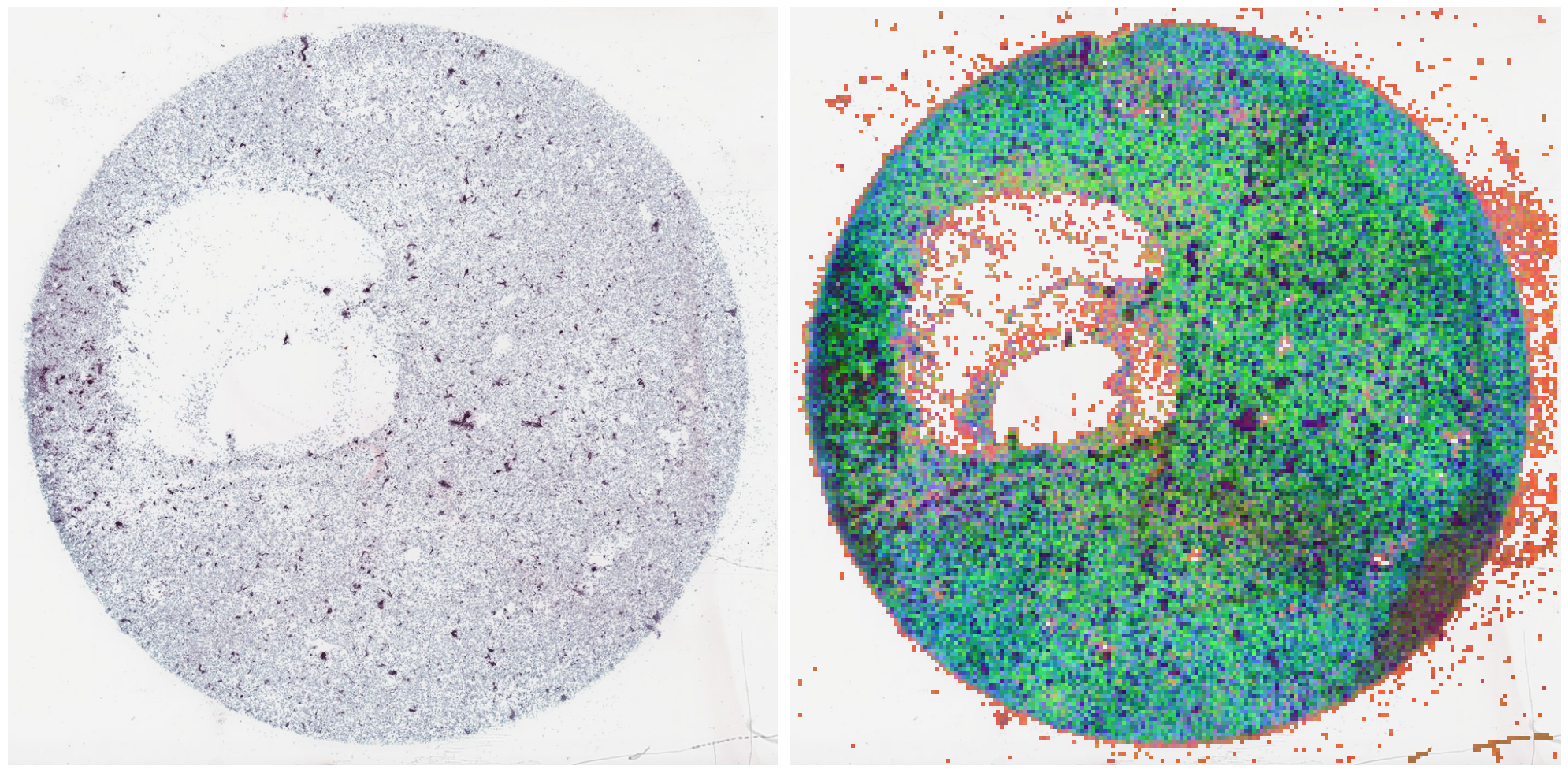
Notice, however, that those 3 main components only account for 18% of the distribution of features learned (a good sign!), signifying that each feature learned by our fine-tune of DinoV3 has unique information about the tile.